
Here are some things I’ve worked on in the past. (See the Publications section for more information.)
Optimization and IQCs
This work uses the framework of Integral Quadratic Constraints (IQCs), a tool from robust control, to analyze the convergence and noise amplification of gradient descent with varying step sizes. This varying step size is assumed to occur in a known interval. Building on prior constant step-size results, LMI conditions which are to be satisfied at each point in the step-size interval are constructed. This allows for certifying convergence rates and variance amplification of the iterate.
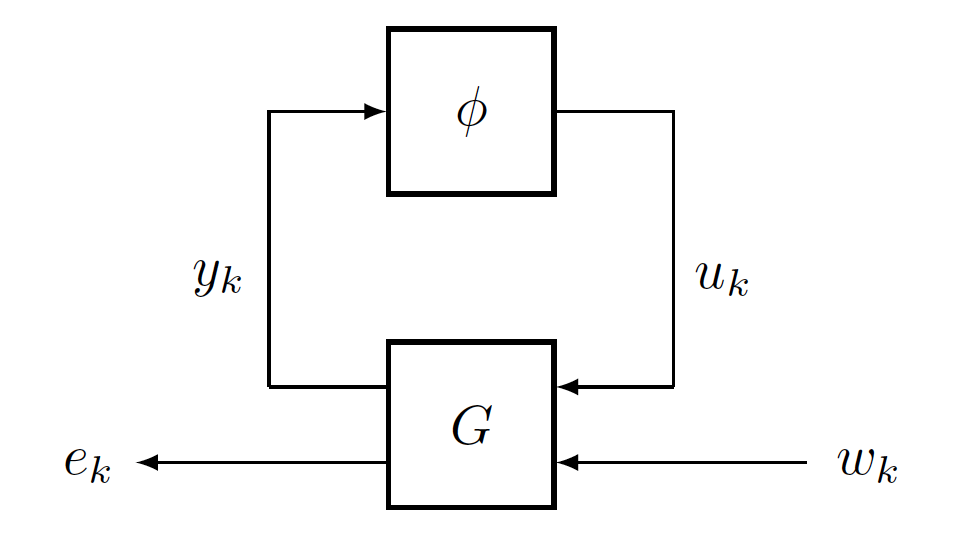
Multiple Models in Adaptive ILC
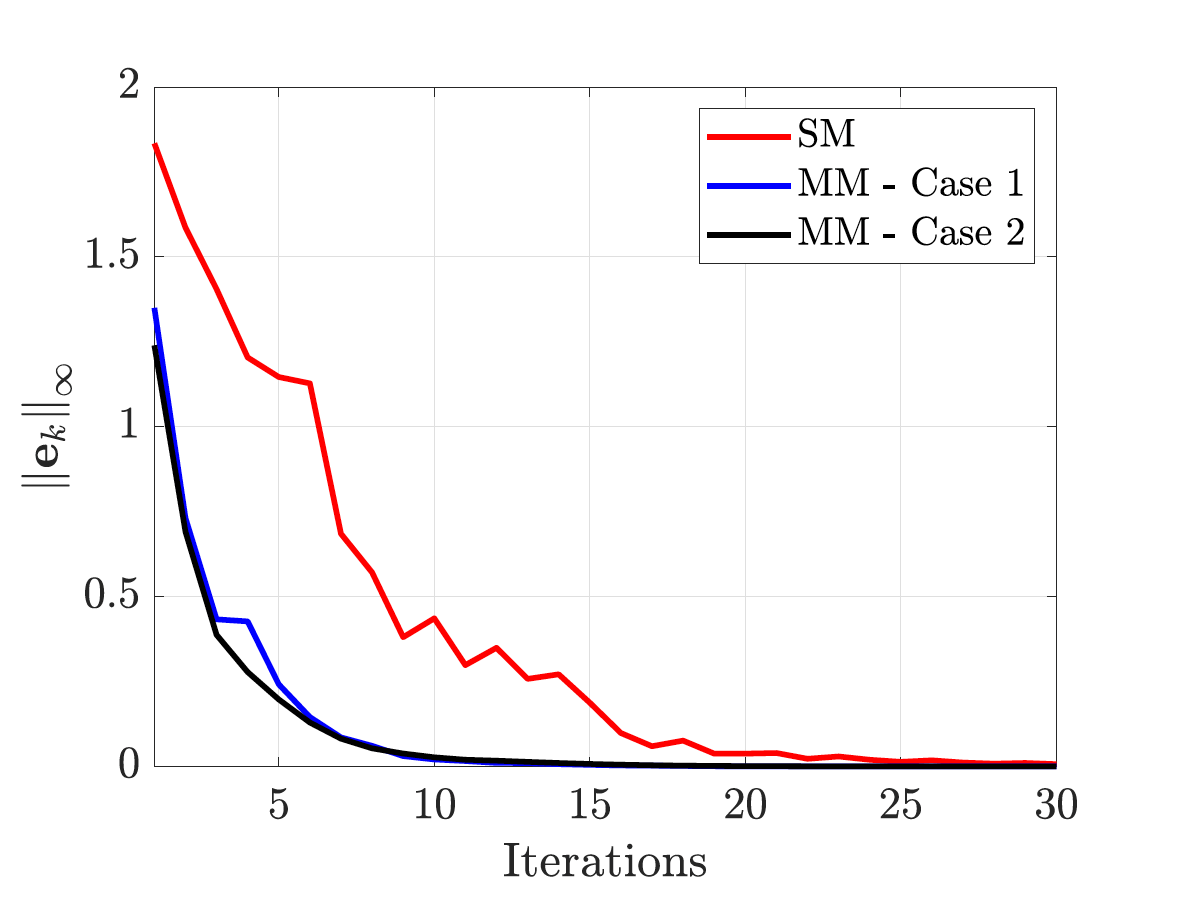
Based on the Multiple Models, Switching and Tuning (MMST) methodology, a new estimation and control procedure for discrete-time Adaptive Iterative Learning Control is proposed. This uses the analogy between the discrete-time axis and the iteration axis in Iterative Learning Control. Simulations demonstrate improved performance using multiple models for various classes of systems, even when tracking an iteration-varying reference.
Discrete-time Uncertainty and Disturbance Estimator
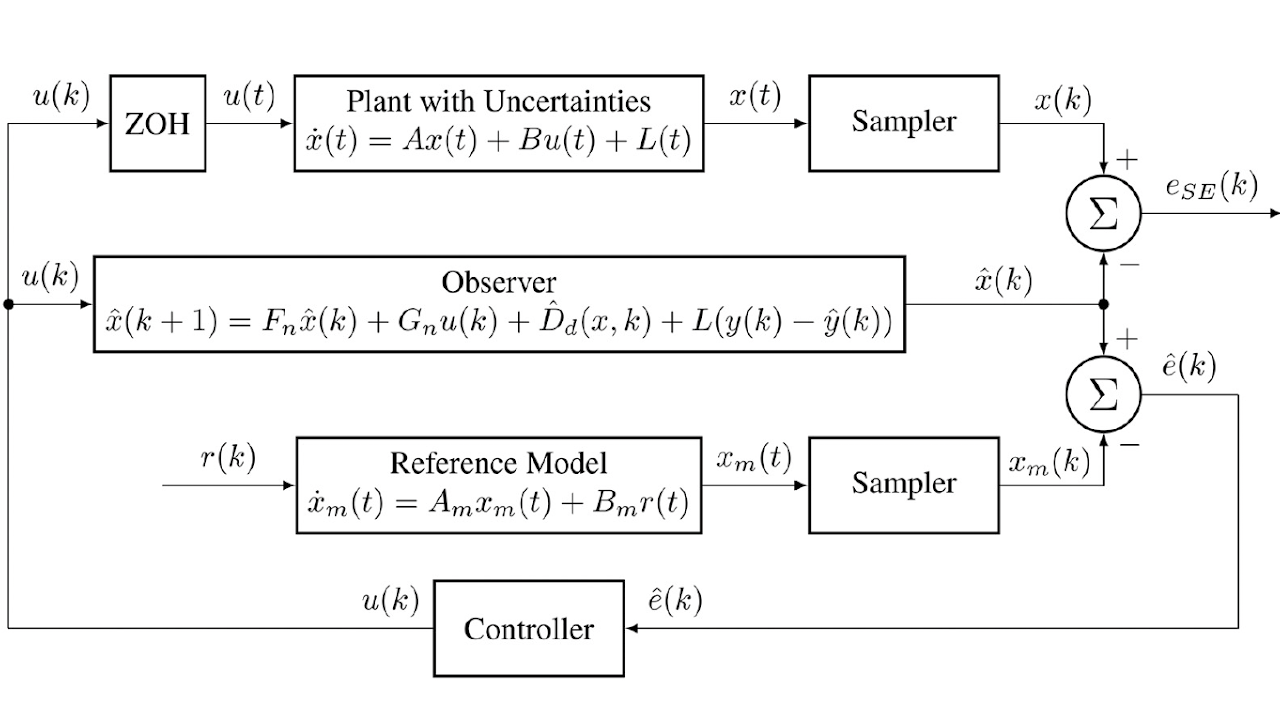
A discrete-time version of the Uncertainty and Disturbance Estimator (UDE), a robust control strategy, is presented. This work proposes a new digital filter for disturbance estimation and compensation to derive a discrete-time error-based control law and prove stability. Interfacing with continuous-time systems uses a digital-analog converter and a zero-order-hold. A discrete-time controller—observer structure is also proposed, to address the case when only system outputs are accessible. Simulations on a variety of linear and nonlinear systems, including well-known systems in aerospace engineering and robotics, demonstrate the efficacy of the proposed methods.